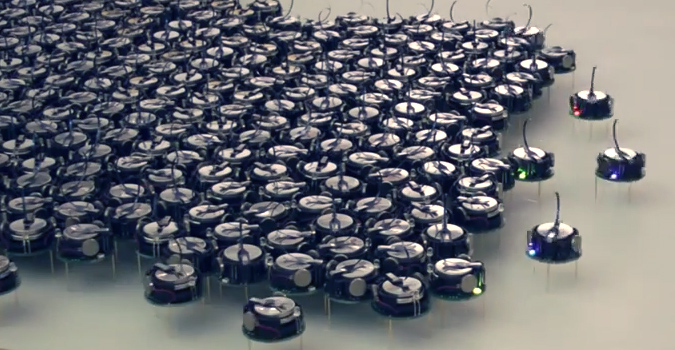
Ceci est un essaim de 1000 robots capables de coopérer
Des chercheurs de Harvard ont mis au point un essaim autonome de 1024 robots capables de coopérer pour former ensemble le dessin demandé.
Avec l'intelligence artificielle, le travail sur les essaims de robots (ou "swarms") figure parmi les recherches les plus passionnantes et les plus prometteuses dans le domaine de la robotique.
Dans le magazine Science (relayé par The Conversation), des chercheurs de l'Université de Harvard ont dévoilé une expérience réalisée avec 1024 robots conçus pour collaborer entre eux afin d'atteindre une tâche prédéfinie. On se souvient que dès 2010, nous avions relayé les travaux de roboticiens de Zurich, qui avaient fait collaborer des robots pour voler. Cette fois-ci, il s'agissait de parvenir à former un dessin en faisant que chaque robot occupe géographiquement une place utile à l'objectif final.
Pour y parvenir, les robots baptisés "Kilobots" ne disposent que de quelques capteurs et émetteurs très sommaires. Ils peuvent ainsi communiquer avec leurs voisins en utilisant des lumières infrarouges et en signalant leur état par des LED qui changent de couleur. Conçus pour être au plus bas coût possible, les robots se déplacent sur trois petites "pattes" activées par des vibreurs, se rechargent en étant pris "en sandwich" entre deux plaques conductrices, et sont programmés à distance.
Le principe est ensuite relativement simple. Un premier robot se déplace et va occuper un premier "pixel", selon le dessin qui lui est fourni. Il déclare alors qu'il est position, et signale quelle est cette position. Un deuxième robot arrive alors et se met à côté de lui, au niveau d'un autre pixel qui doit être occupé. Et ainsi de suite, à la queue-leu-leu. L'algorithme conçu par les chercheurs se charge d'optimiser les déplacements et de gérer les erreurs.
Pour le moment, les robots doivent obéir à la forme finale demandée par les chercheurs, et suivent un algorithme relativement simple. Mais le but à terme est de parvenir à ce que de tels "essaims" puissent déterminer leur propre stratégie pour parvenir à un objectif commun.